Modules Structure¶
Specifications¶
OpenDiS relies on a modular architecture: each functionality (e.g. force calculation, mobility law, post-processing analysis, etc.) is implemented as a module, exposed as a python class to the framework.
Below is a typical prototype for an OpenDiS module:
class MyModule:
""" Prototype of an OpenDiS module """
def __init__(self, state: dict, **kwargs) -> None:
# do some initialization
pass
def Compute(self, N: DisNetManager, state: dict) -> dict:
# Get dislocation network in module-specific format
G = N.get_disnet(MyLibraryDisNet)
# Perform some computations on the network
nodevalues = compute_values(G, state)
# Make some modifications to the network
G, mymoduleflags = modify_network(G, state)
# Update state dictionary
state["nodevalues"] = nodevalues
state["mymoduleflags"] = mymoduleflags
return state
Each method implemented in a module (e.g. the
Compute()method) must adhere to the following specifications:Receives a DisNetManager and the state dictionary as input arguments
Can perform computation(s) on the network
Can modify the network (e.g. topological operations)
Returns an updated state dictionary
Special base modules such as Force calculation and Mobility law modules have additional specifications to guarantee consistency of the implementations:
Force calculations modules: see the CalForce_Base specification class.
Mobility law modules: see the MobilityLaw_Base specification class.
Compatibility and inter-operability between modules is maintained via the two following objects:
DisNetManager: container class that allows for co-existence and conversion between various dislocation network data structures. This allows for different modules to use their own data structures to manipulate the networks. See DisNetManager class.state: dictionary containing the global parameters (e.g. materials parameters, simulation settings, nodal forces, etc.) pertaining to the state of a simulation / analysis. Modules can communicate by writing/reading items into the state dictionary. See State Dictionary.
Building a simulation¶
In the general sense, a simulation (or analysis pipeline) in OpenDiS can be constructed as a sequence of modules, e.g. as illustrated in the figure below:
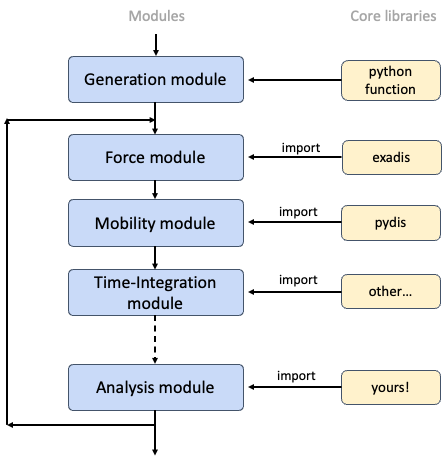
where individual modules may come from different core libraries or implementations.
For running traditional DDD simulations, simulation drivers are provided in core libraries (e.g. see Simulation driver section). These drivers loop over a sequence of modules that define the traditional DDD cycle, e.g.
Force module
Mobility module
Time-integration module
Collision module
Topology module
Cross-slip module
Remesh module
Update stress module
Output module